Note
Click here to download the full example code
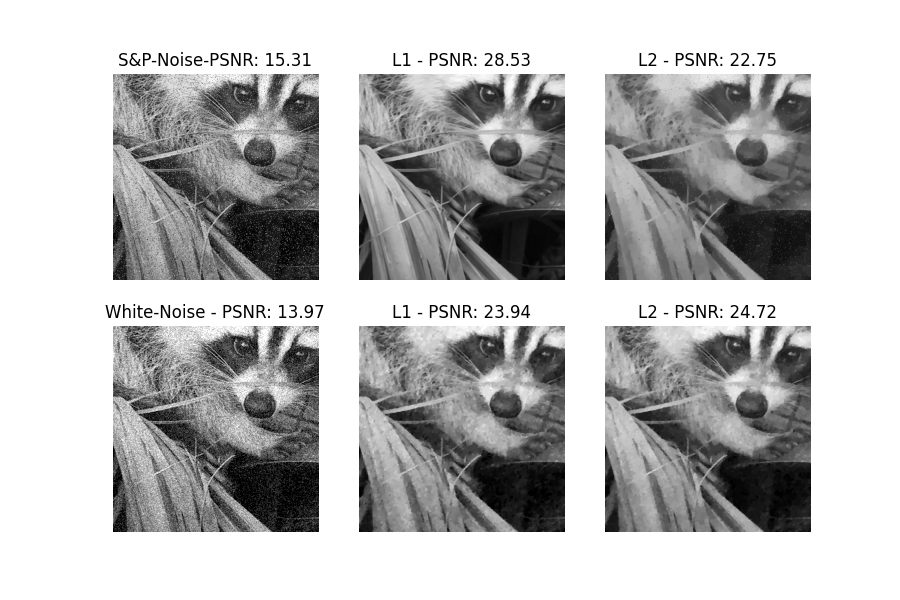
06. L1 vs. L2 Fidelity-Term¶
This tutorial shows the difference between two fidelity norms with different underlying noise types. Here using the example of Salt-And-Pepper and Gaussian noise.
import numpy as np
from scipy import misc
import matplotlib.pyplot as plt
from recon.utils.utils import psnr
from recon.interfaces import Smoothing
img = misc.face(gray=True)[256:768,256:768]
img = img/np.max(img)
gt = img
vmin, vmax = 0, 1
sigma = 0.2 * vmax
Create two noisy images.
def sp_noise(image):
"""Add salt and pepper noise to image."""
s_vs_p = 0.5
amount = 0.1
out = np.copy(image)
# Salt mode
num_salt = np.ceil(amount * image.size * s_vs_p)
coords = [np.random.randint(0, i - 1, int(num_salt))
for i in image.shape]
out[coords] = 1
# Pepper mode
num_pepper = np.ceil(amount * image.size * (1. - s_vs_p))
coords = [np.random.randint(0, i - 1, int(num_pepper))
for i in image.shape]
out[coords] = 0
return out
noise_img_sp = sp_noise(gt)
noise_img_white = gt + np.random.normal(0, sigma, size=gt.shape)
Out:
/Users/lucasplagwitz/git_projects/recon/tutorials/datafidelity_L1_vs_L2.py:36: FutureWarning: Using a non-tuple sequence for multidimensional indexing is deprecated; use `arr[tuple(seq)]` instead of `arr[seq]`. In the future this will be interpreted as an array index, `arr[np.array(seq)]`, which will result either in an error or a different result.
out[coords] = 1
/Users/lucasplagwitz/git_projects/recon/tutorials/datafidelity_L1_vs_L2.py:42: FutureWarning: Using a non-tuple sequence for multidimensional indexing is deprecated; use `arr[tuple(seq)]` instead of `arr[seq]`. In the future this will be interpreted as an array index, `arr[np.array(seq)]`, which will result either in an error or a different result.
out[coords] = 0
Application of the various fidelity norms.
# L1-fidelity
tv_smoothing = Smoothing(domain_shape=gt.shape, reg_mode='tv', norm='L1', alpha=1, lam=1, tau='calc')
u_L1_sp = tv_smoothing.solve(data=noise_img_sp, max_iter=2000, tol=1e-4)
tv_smoothing = Smoothing(domain_shape=gt.shape, reg_mode='tv', norm='L1', alpha=0.8, lam=1, tau='calc')
u_L1_white = tv_smoothing.solve(data=noise_img_white, max_iter=2000, tol=1e-4)
# L2-fidelity
tv_smoothing = Smoothing(domain_shape=gt.shape, reg_mode='tv', norm='L2', alpha=0.1, lam=0.5, tau='calc')
u_L2_sp = tv_smoothing.solve(data=noise_img_sp, max_iter=2000, tol=1e-4)
tv_smoothing = Smoothing(domain_shape=gt.shape, reg_mode='tv', norm='L2', alpha=0.1, lam=0.6, tau='calc')
u_L2_white = tv_smoothing.solve(data=noise_img_white, max_iter=2000, tol=1e-4)
# plot
f = plt.figure(figsize=(9, 6))
# Salt-And-Pepper
f.add_subplot(2, 3, 1)
plt.axis('off')
plt.gray()
plt.imshow(noise_img_sp, vmin=vmin, vmax=vmax)
plt.title("S&P-Noise-PSNR: "+str(psnr(gt, noise_img_sp)))
f.add_subplot(2, 3, 2)
plt.imshow(u_L1_sp, vmin=vmin, vmax=vmax)
plt.title("L1 - PSNR: "+str(psnr(gt, u_L1_sp)))
plt.axis('off')
plt.gray()
f.add_subplot(2, 3, 3)
plt.imshow(u_L2_sp, vmin=vmin, vmax=vmax)
plt.title("L2 - PSNR: "+str(psnr(gt, u_L2_sp)))
plt.axis('off')
plt.gray()
# Gaussian
f.add_subplot(2, 3, 4)
plt.axis('off')
plt.gray()
plt.imshow(noise_img_white, vmin=vmin, vmax=vmax)
plt.title("White-Noise - PSNR: "+str(psnr(gt, noise_img_white)))
f.add_subplot(2, 3, 5)
plt.imshow(u_L1_white, vmin=vmin, vmax=vmax)
plt.title("L1 - PSNR: "+str(psnr(gt, u_L1_white)))
plt.axis('off')
plt.gray()
f.add_subplot(2, 3, 6)
plt.imshow(u_L2_white, vmin=vmin, vmax=vmax)
plt.title("L2 - PSNR: "+str(psnr(gt, u_L2_white)))
plt.axis('off')
plt.gray()
plt.show(block=False)
Out:
Early stopping.
Early stopping.
Early stopping.
Early stopping.
Total running time of the script: ( 2 minutes 27.311 seconds)